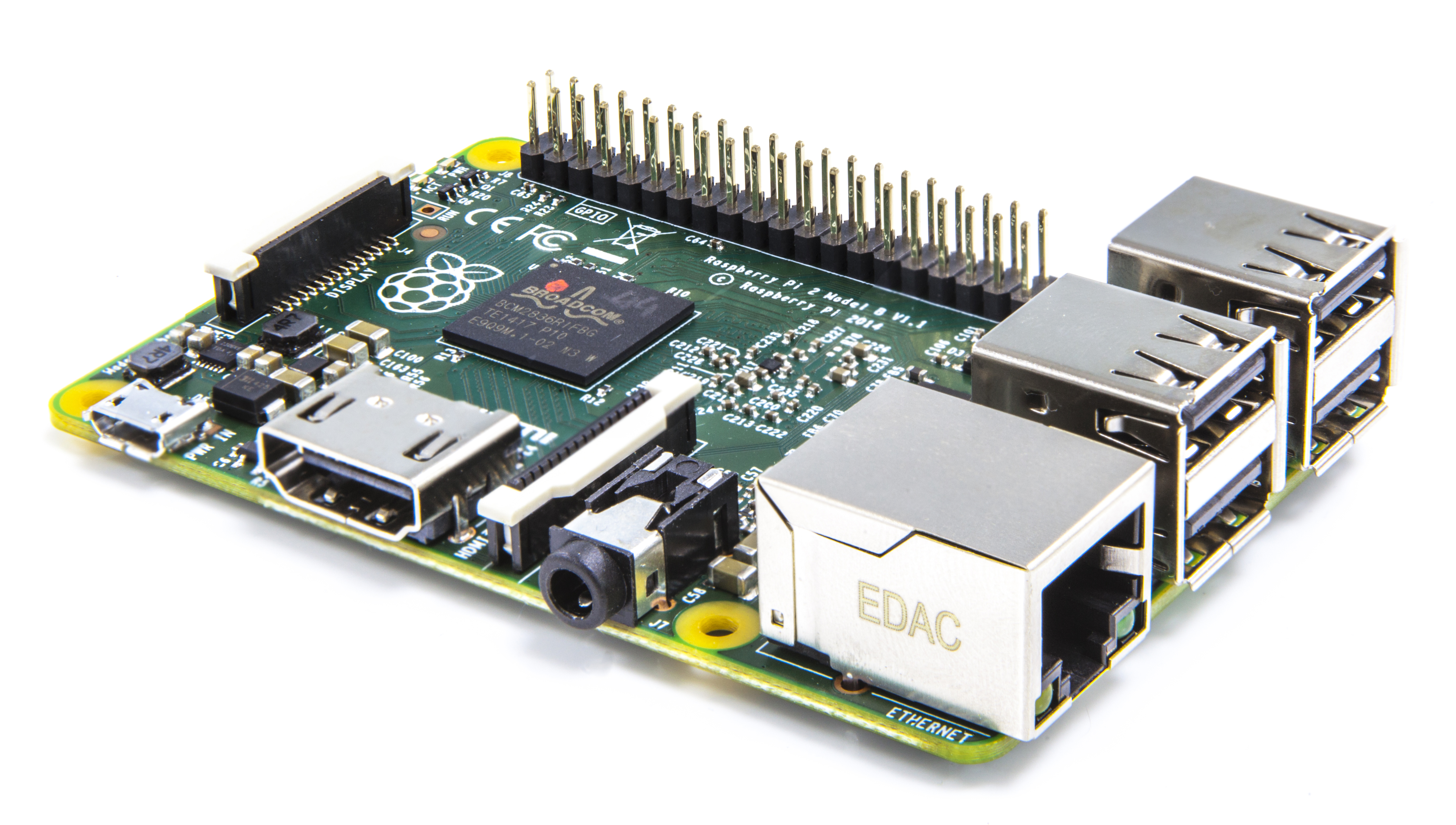
Raspberry est un micro-ordinateur plutôt performant et disponible à faible coût, il est ici utilisé avec Raspbian et permet un interfaçage entre l'ordinateur et le rover. Vous trouverez plus d'informations sur le site officiel
Raspberry est un micro-ordinateur plutôt performant et disponible à faible coût, il est ici utilisé avec Raspbian et permet un interfaçage entre l'ordinateur et le rover. Vous trouverez plus d'informations sur le site officiel
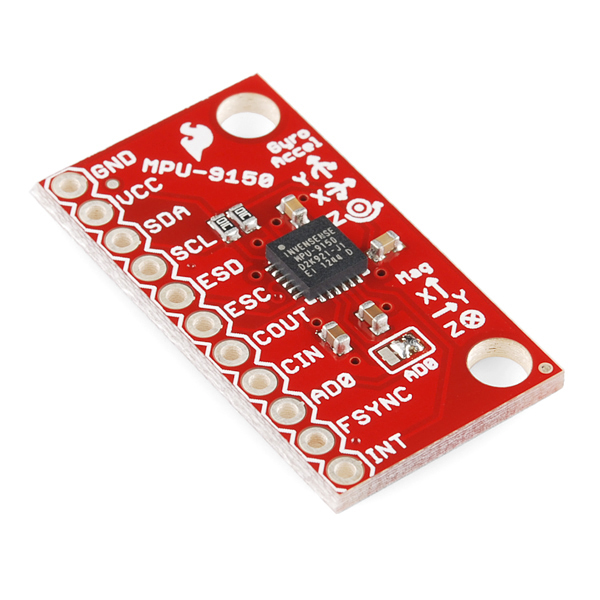
Cette carte dotée d'un système à neuf axes comprend une puce d'inertie qui a pour rôle de calculer l'accélération de celle-ci, qui, après intégration, permet de retrouver les informations de la vitesse et de la distance par rapport à un point afin de calculer l'équation de la courbe. Elle peut être retrouvée sur le site officiel du produit.

Cette carte permet de relier les moteurs au Raspberry et de les contrôler. Il s'agit d'une carte remplissant le mieux sa fonction, alliant essentiel et performances. Elle peut également réaliser un interfaçage entre un PC et les moteurs. Vous trouverez plus d'informations sur Robot Shop.